

救援無人機網路:蒙特奧薩羅成功的無人機演習
在惡劣條件下使用 Pollicino 設備測試無人機輔助搜索和救援的未來
24月XNUMX日星期六,預定的演習 救援無人機網路 Odv在滿足所有必要的官僚要求後,艾米利亞羅馬涅部分在蒙特奧薩羅舉行。
演習的目的除了模擬 尋找失蹤人員 和 攝影測量 當地滑雪勝地的一個區域的目的是透過 D-Flight 入口網站測試 TopView Srl 公司的 Thumb 設備,旨在開發 U-SPACE 服務。
從這個意義上說,在d-flight門戶上打開必要的PDO後,該設備一旦被激活以檢查其操作,立即 傳輸資料 透過在幹預團隊安裝的螢幕上可見。
然而,天氣條件立即證明很困難,有時令人望而卻步,因此有必要 使用防水、防雪以及持續風的裝置.
然而,由於在場人員的出色組織準備,一些任務得以在當天下午繼續進行。
部分團隊已搬入 全地形車 在雪道上跟隨環保嚮導,從而到達計劃的起飛點。

困難有很多,但又是 訓練 造成影響的介入人員;
效率, 準備 和 適應性 立即出現。
總而言之,使用拇指操縱桿獲得的數據非常有用且易於視覺化,特別是考慮到潛在的目擊情況以及無人機座標顯示的速度。
這是支持 U-ELCOME 計畫發展的關鍵一步,該計畫是 U-SPACE 服務的一部分,旨在規範無人機在空域的安全和高效存取。在這個 埃納夫 d-flight 處於義大利實施的最前沿,在本例中是與 RDN OdV 一起實作。
所有參與者之間的良好合作使這項工作成為可能,從 Ente Parco Appennino Tosco Emiliano 2000、Villa Minozzo 市政府、Planeta Snc 公司開始。
然後,AARI CB Lugo ODV、ASD Passi da Gigante、全國失物招領 SOS 金屬探測器協會等協會分享了他們在該領域的專業精神和經驗,最後還有 Zamboni 和 Peschiera 避難所的管理人員。
相簿
上一頁 1 of 4 下一頁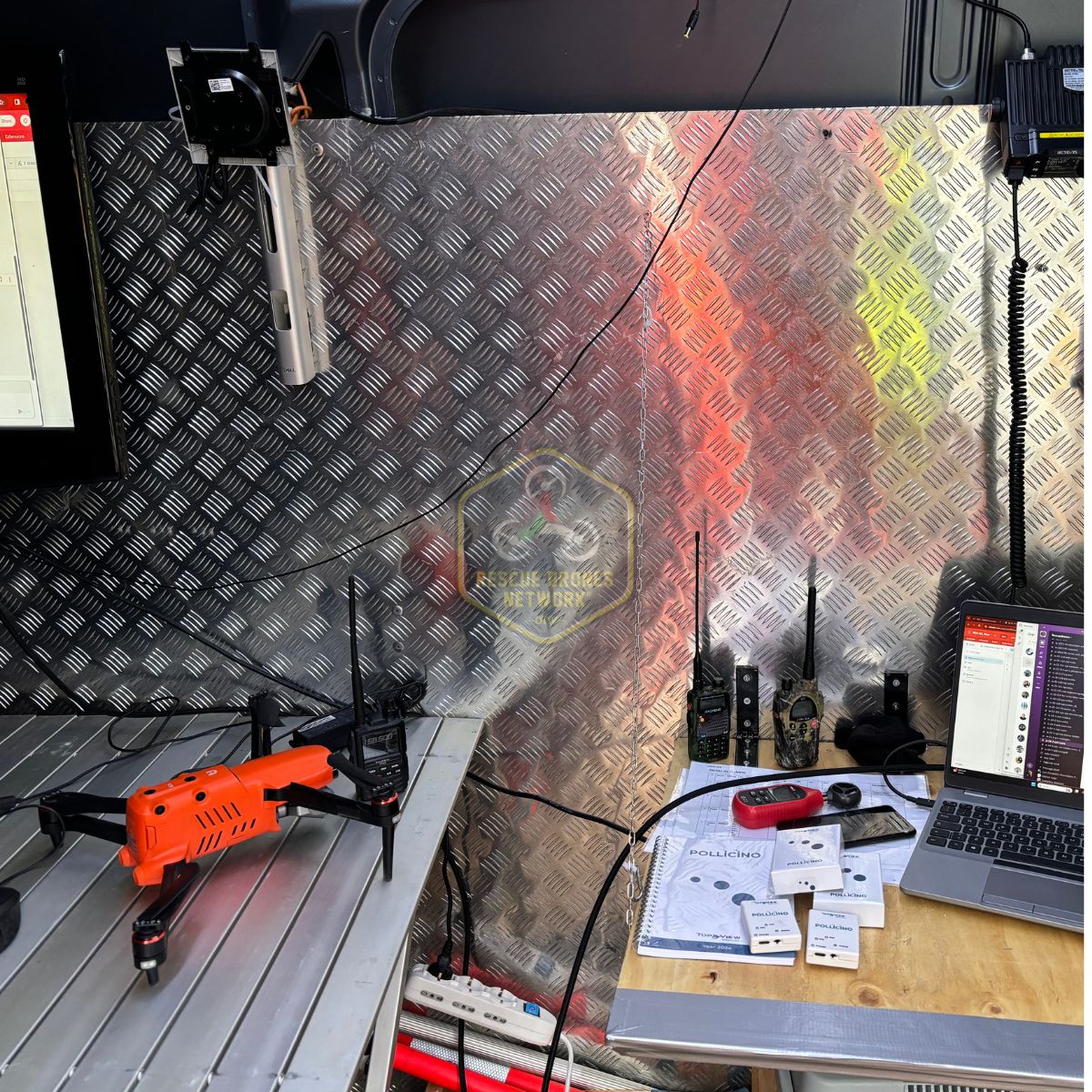



來源和圖片